

วิศวกรจาก Google และมหาวิทยาลัย Carnegie Mellon นำเสนองานวิจัยชิ้นใหม่ แสดงให้เห็นถึงหุ่นยนต์ที่สามารถเรียนรู้การจับวัตถุได้อย่างถูกต้องและแข็งแรง จับอย่างไรไม่ให้โดนหุ่นยนต์ตัวอื่นแย่งไปได้
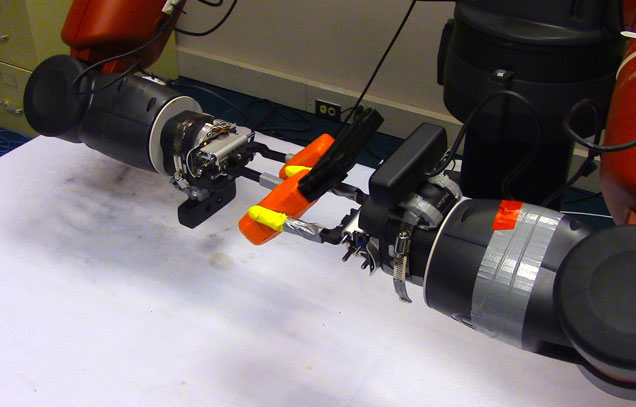
จากงานวิจัยชิ้นดังกล่าวได้ถูกนำเสนอภายในการประชุมนานาชาติทางด้านหุ่นยนต์และการทำงานแบบอัตโนมัติ (ICRA) ประจำปี 2017 ซึ่งหุ่นยนต์ต้นแบบจะถูกแบ่งออกเป็น 2 ตัวอย่าง ตัวอย่างที่ 1 จะเป็นหุ่นยนต์ที่คอยหยิบวัตถุต่างๆ ขึ้นมาจับไว้ ตัวอย่างที่ 2 จะเป็นหุ่นยนต์ที่จะคอยแย่งสิ่งของที่หุ่นยนต์ตัวแรกจับไว้ ซึ่งหากหุ่นยนต์ตัวแรกจับสิ่งของไม่ถูกต้อง หุ่นยนต์ตัวที่สองจะสามารถแย่งสิ่งของไปได้โดยง่าย
แต่เมื่อหุ่นยนต์ตัวแรกถูกแย่งสิ่งของซ้ำๆ จะค่อยๆ เรียนรู้วิธีการจับสิ่งของให้ถูกต้องและมั่นคงได้อัตโนมัติ จนหุ่นยนต์ตัวที่สองไม่สามารถแย่งไปได้

แนวคิดของการวิจัยครั้งนี้ เป็นการโปรแกรมให้หุ่นยนต์รู้จักเรียนรู้ในความล้มเหลว และรู้จักที่จะหาวิธีที่ถูกต้องเพื่อให้เกิดความสำเร็จ และการปรับตัวภายใต้สภาพแวดล้อมที่มีความท้าทายตลอดเวลา
ที่มา spectrum.ieee และ digitaltrends









{kind=link}